###1. linux的电源管理架构
linux的电源管理的粗略的架构如下:
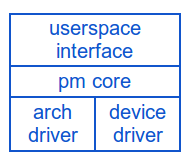
在用户接口之下, 是由kernel中的 power core(位于kernel/power/)来处理与硬件无关的核心逻辑, 往下则是相关的driver,一部分是硬件体系结构相关的driver, 另一部分则是各设备驱动实现的电源管理功能
###2. 原始的linux电源管理
在移动设备爆发之前, linux大部分被安装到pc机和服务器上面, 性能是首要的追求目标, 而电源管理则不是重点, 早期的linux电源管理极为粗放, 仅仅只是提供了 关机, 重启, 休眠(hibernate, 保存到硬盘), 睡眠(sleep, 保存到内存), 关闭显示器这些功能
这些功能的用户接口如下:
- 关机/重启 : 使用系统调用reboot()来实现, 另外sysRq(组合键或者写/proc/sys-trigger)也可用于触发reboot
- hibernate : echo disk > /sys/power/state
- sleep : echo mem > /sys/power/state
###3. reboot的流程
reboot系统调用根据第3个参数的不同, 可执行halt, poweroff, restart等不同的动作:
- LINUX_REBOOT_CMD_CAD_OFF : 禁用 Ctrl + Alt + Delet组合键重启
- LINUX_REBOOT_CMD_CAD_ON : 启用 Ctrl + Alt + Delet组合键重启
- LINUX_REBOOT_CMD_HALT
- LINUX_REBOOT_CMD_KEXEC : 直接运行另一个kernel,可用于快速重启
- LINUX_REBOOT_CMD_POWER_OFF
- LINUX_REBOOT_CMD_RESTART
- LINUX_REBOOT_CMD_RESTART2
echo c > /proc/sysrq-trigger和echo b > /proc/sysrq-trigger 分别用于crash和reboot系统
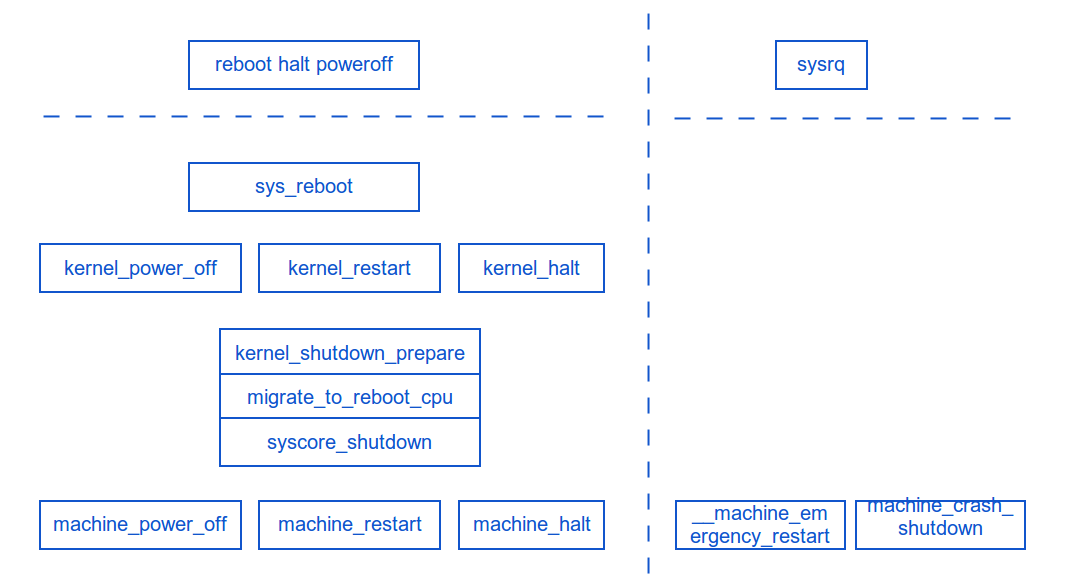
- kernel_shutdown_prepare 中发出reboot通知, 调用所有device的shutdown回调
- migrate_to_reboot_cpu 用于将task迁移到boot cpu上并且禁止在其它的cpu上调度任务
- syscore_shutdown 调用所有的syscore_ops的shutdown回调
- machine_power_xxx 和体系机构相关, 调用个体系结构定应的machine_ops结构体中的对应的回调
- sysrq直接调用machine_ops的回调来处理, 这样会丢失系统运行期间的数据
machine_ops的具体实现和系统架构相关
###4. 设备和驱动的电源管理回调
设备的电源管理是linux的电源管理的核心内容, 设备的电源管理回调实现定义好的接口, PM core在合适的时机调用相关的接口将设备置为合适的状态以节省电源
旧版的内核中, PM callback散布在设备模型的各个地方
struct bus_type {
......
void (*shutdown)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev);
......
}
struct device_driver {
......
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
......
}
struct class {
......
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev);
......
}
这么做的后果就是一旦需要添加新的电源管理接口, 就需要修改这些数据结构, 破坏了数据的封装特性, 新的内核中, 将这些回调统一成一个新的数据结构 struct dev_pm_ops, 上述的数据结构只需要包含 dev_pm_ops 即可, 当然, 为了保持兼容性, 旧的callback还是被保留了, 但是不建议使用了
dev_pm_ops在 bus_type, device_driver, device_type结构中
新的 dev_pm_ops 结构如下 :
struct dev_pm_ops {
int (*prepare)(struct device *dev);
void (*complete)(struct device *dev);
int (*suspend)(struct device *dev);
int (*resume)(struct device *dev);
int (*freeze)(struct device *dev);
int (*thaw)(struct device *dev);
int (*poweroff)(struct device *dev);
int (*restore)(struct device *dev);
int (*suspend_late)(struct device *dev);
int (*resume_early)(struct device *dev);
int (*freeze_late)(struct device *dev);
int (*thaw_early)(struct device *dev);
int (*poweroff_late)(struct device *dev);
int (*restore_early)(struct device *dev);
int (*suspend_noirq)(struct device *dev);
int (*resume_noirq)(struct device *dev);
int (*freeze_noirq)(struct device *dev);
int (*thaw_noirq)(struct device *dev);
int (*poweroff_noirq)(struct device *dev);
int (*restore_noirq)(struct device *dev);
int (*runtime_suspend)(struct device *dev);
int (*runtime_resume)(struct device *dev);
int (*runtime_idle)(struct device *dev);
};
- prepare
- complete
- suspend
- resume
- freeze
- thaw
- poweroff
- restore
- suspend_late
- resume_early
- freeze_late
- thaw_early
- poweroff_late
- restore_early
- suspend_noirq
- resume_noirq
- freeze_noirq
- thaw_noirq
- poweroff_noirq
- restore_noirq
- runtime_suspend
- runtime_resume
- runtime_idle
以suspend为例, 其调用流程为: prepare() -> suspend() -> suspend_late() -> suspend_noirq() 而resume的流程则为 : resume_noirq() -> resume_early() -> resume() -> complete()
runtime_xxx 属于后来引入的runtime_pm, 后续会介绍
驱动工程师应该根据熟悉每一个callback的使用场景, 根据需要来实现
###5. dev_pm_info和dev_pm_domain
dev_pm_info的成员达到40多个, 保存了设备的PM状态, 例如能否唤醒, 是否已经suspend, 此处不一一列举
pm_doamin只包含了一个dev_pm_ops的结构, 可能后续会继续添加其它成员, dev_pm_ops 存在于bus_type , device_driver, class, device_type中, 他们都属于device driver, 对于没有driver的device, 若要处理它的电源管理, 就需要dev_pm_domain
###6. PM callback的辅助函数
PM core在调用device的PM callback时, 需要判断其是否存在,若存在则执行, 为此, 提供了一堆辅助API:
int pm_generic_prepare(struct device *dev);
int pm_generic_suspend_late(struct device *dev);
int pm_generic_suspend_noirq(struct device *dev);
int pm_generic_suspend(struct device *dev);
int pm_generic_resume_early(struct device *dev);
int pm_generic_resume_noirq(struct device *dev);
int pm_generic_resume(struct device *dev);
int pm_generic_freeze_noirq(struct device *dev);
int pm_generic_freeze_late(struct device *dev);
int pm_generic_freeze(struct device *dev);
int pm_generic_thaw_noirq(struct device *dev);
int pm_generic_thaw_early(struct device *dev);
int pm_generic_thaw(struct device *dev);
int pm_generic_restore_noirq(struct device *dev);
int pm_generic_restore_early(struct device *dev);
int pm_generic_restore(struct device *dev);
int pm_generic_poweroff_noirq(struct device *dev);
int pm_generic_poweroff_late(struct device *dev);
int pm_generic_poweroff(struct device *dev);
void pm_generic_complete(struct device *dev);
以pm_generic_prepare为例,就是查看dev->driver->pm->prepare接口是否存在,如果存在,直接调用并返回结果
PM core需要遍历所有的设备, 来执行其PM callback, 可以使用如下API
void device_pm_lock(void);
void dpm_resume_start(pm_message_t state);
void dpm_resume_end(pm_message_t state);
void dpm_resume(pm_message_t state);
void dpm_complete(pm_message_t state);
void device_pm_unlock(void);
int dpm_suspend_end(pm_message_t state);
int dpm_suspend_start(pm_message_t state);
int dpm_suspend(pm_message_t state);
int dpm_prepare(pm_message_t state);
int device_pm_wait_for_dev(struct device *sub, struct device *dev);
void dpm_for_each_dev(void *data, void (*fn)(struct device *, void *));
设备驱动模型在add device时, 会调用device_pm_add将其添加到全局链表dpm_list中, 调用上述API会遍历该链表, 对每一个device调用其callback
###7. PM callback的调用顺序
以device_prepare为例, 可以看到, 依次寻找:
- dev->pm_domain
- dev->type->pm
- dev->class->pm
- ev->bus->pm
- dev->driver->pm
越往后优先级越高, 优先及最高的将被调用, 其它的不会被调用 其它回调也是如此
